Continuously Variable Transmission (Dual-Motor Control System)
GitHubOverview
Designed a dual-motor continuously variable transmission system that dynamically allocates torque through a differential-based architecture under varying load conditions.
The system models real-time allocation under stochastic demand.
Core Idea
The system demonstrates how dynamic allocation under uncertainty can be achieved through feedback control rather than static distribution.
At its core, it behaves like a real-time allocator of constrained capacity responding to changing external demand signals.
Key Features
- Dual-motor differential architecture for variable torque output
- Real-time load detection and adaptive power redistribution (Arduino / C++)
- Feedback-based control loop adjusting motor contribution under stress
- Simulation of load-dependent system response under varying torque regimes
- Mechanical design + CAD-based system architecture (SolidWorks)
System Dynamics
Motor 1: High-speed / low-torque input stream
Motor 2: Low-speed / high-torque stabilizer
Differential: Aggregation layer balancing competing inputs
Output: Stabilized system response under external load shocks
System Insight (Trading Analogy)
Mechanical System Market Interpretation
Torque demand Order flow pressure
Dual motors Multiple liquidity sources
Differential Execution layer
Load variation Volatility regime shifts
Feedback control Adaptive execution logic
Summary
A feedback-driven allocation system demonstrating how constrained resources can be dynamically balanced under stochastic demand - analogous to execution systems under changing order flow and volatility regimes.
Closed-Loop Torque Allocation & Feedback Control System
Benchmarks and system outputs demonstrating real-time torque balancing, feedback-driven motor coordination, and dynamic load adaptation in a dual-motor differential system under varying mechanical stress conditions.
Dual-Motor Load Response & Torque Allocation System
Real-time torque detection enabling adaptive load redistribution under varying resistance.
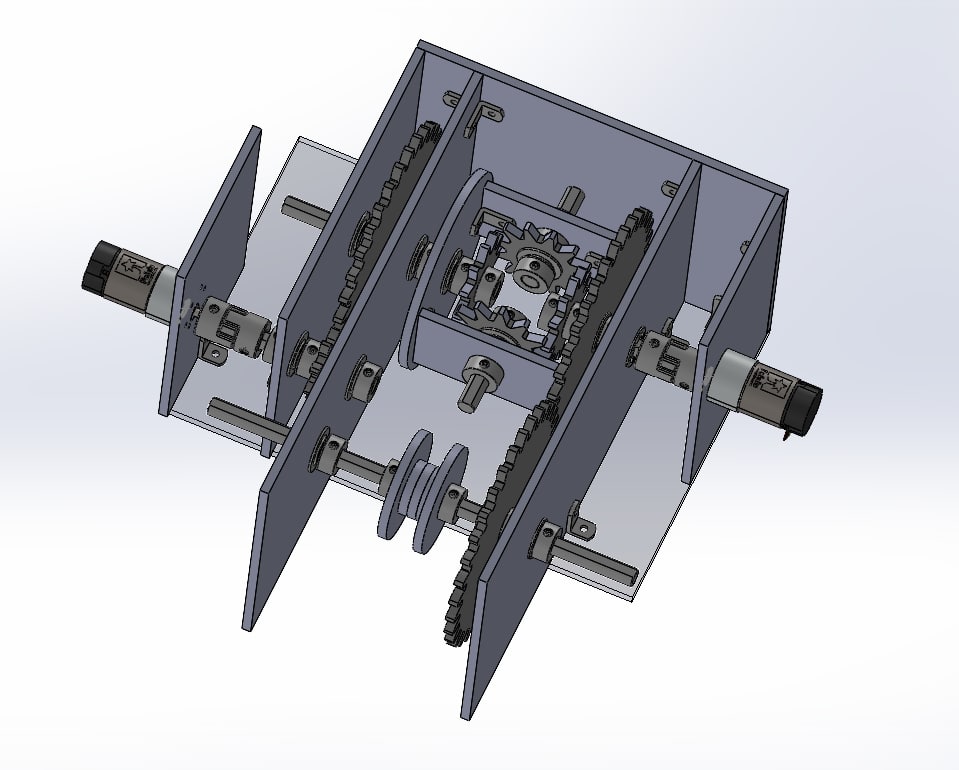
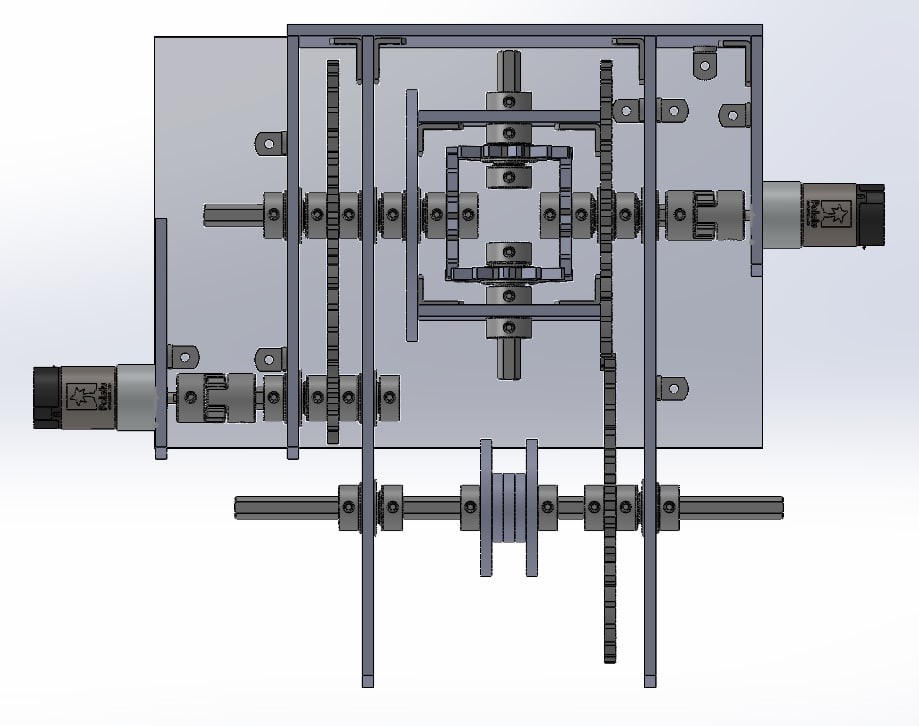
System Architecture & Mechanical Design Layout
SolidWorks-based top-down design of the dual-motor differential system showing structural configuration and power flow pathways.
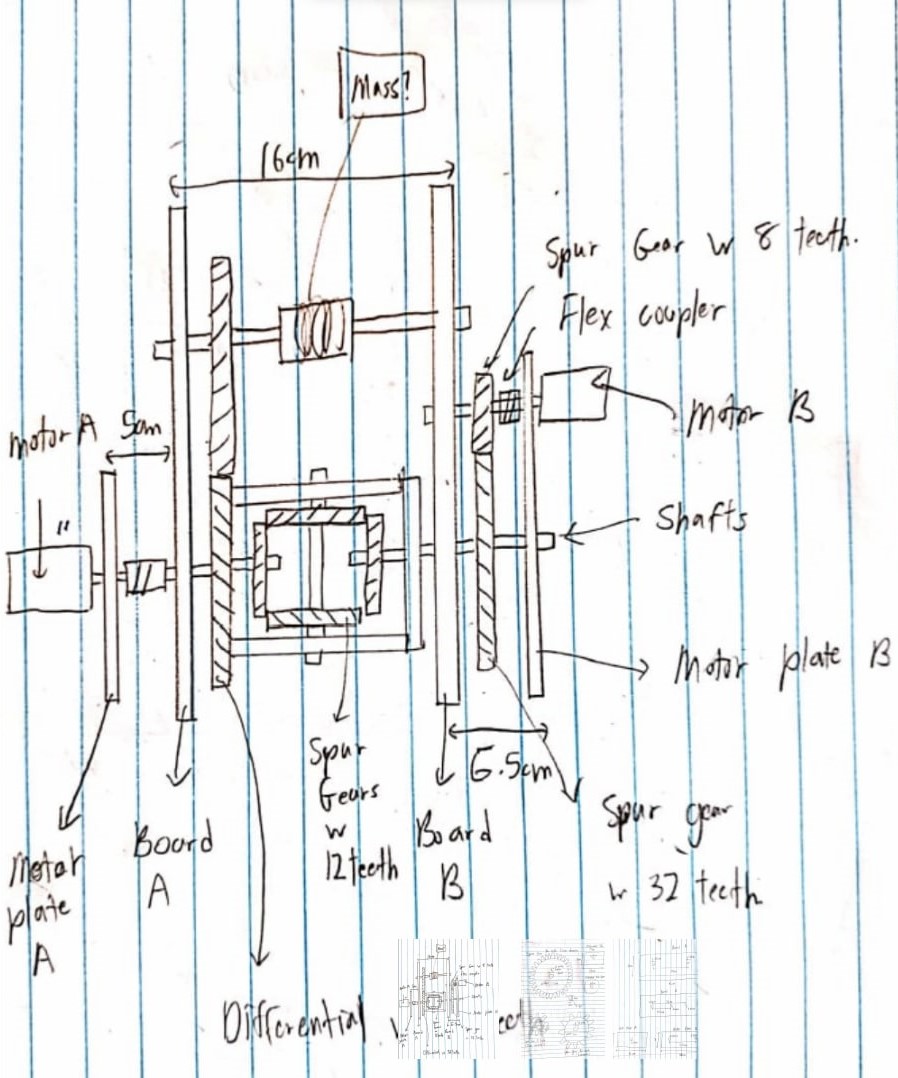
Differential Schematic & Power Distribution Model
System-level schematic of torque flow and differential output under variable load.
Real-Time Load Adaptation (1.2kg Stress Test)
System response under load demonstrating closed-loop torque stabilization.
Design Recognition – UC Berkeley Engineering Showcase
Recognition of system design for adaptive control under constrained power input.
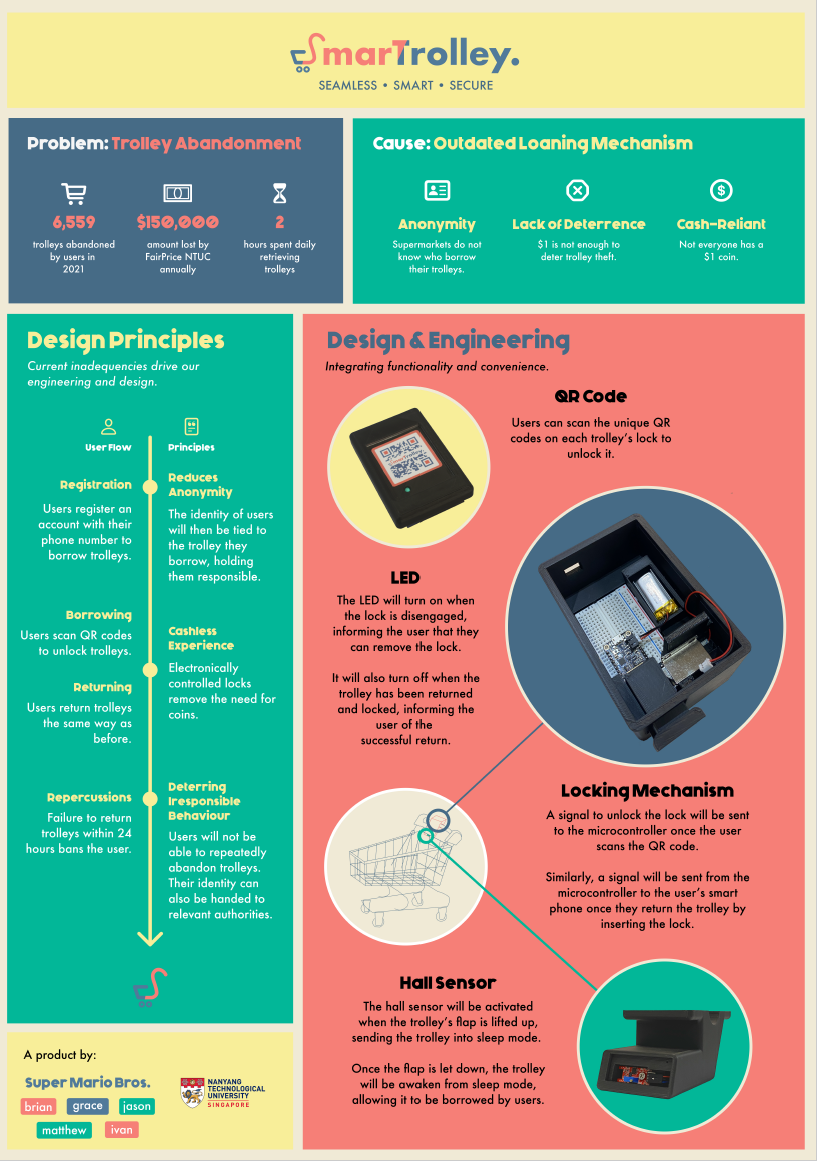
Smart Trolley Locking & Access Control System
Overview
Designed an embedded access control system for shared mobility assets, integrating authentication, locking mechanics, and real-time state tracking through an app-based interface.
The system models state transition under multi-agent contention, where access, locking, and validation operate as a deterministic state machine under competing requests.
Core Idea
State transition system under competing requests, where system state evolves deterministically based on multi-agent inputs.
System Behavior
User request → authentication layer
Validation → state transition logic
Actuation → physical execution (lock / unlock)
Sensor feedback → state confirmation loop
System Insight (Trading Mapping)
System Component Market Interpretation
Authentication Order validation
Lock state Position state
Actuator Execution engine
Sensor feedback Post-trade confirmation
Shared resource system Liquidity pool under competing agents
Summary
An embedded state-control system demonstrating reliable access management under competing agents, analogous to execution validation and state consistency in multi-participant systems.
State Transition Control System under Multi-Agent Access Constraints
Benchmarks and system outputs demonstrating embedded locking mechanisms, user authentication flow, and state-controlled actuation in a shared mobility system.
App-Controlled Access & Locking System
QR-based authentication enabling state transitions via embedded control system.
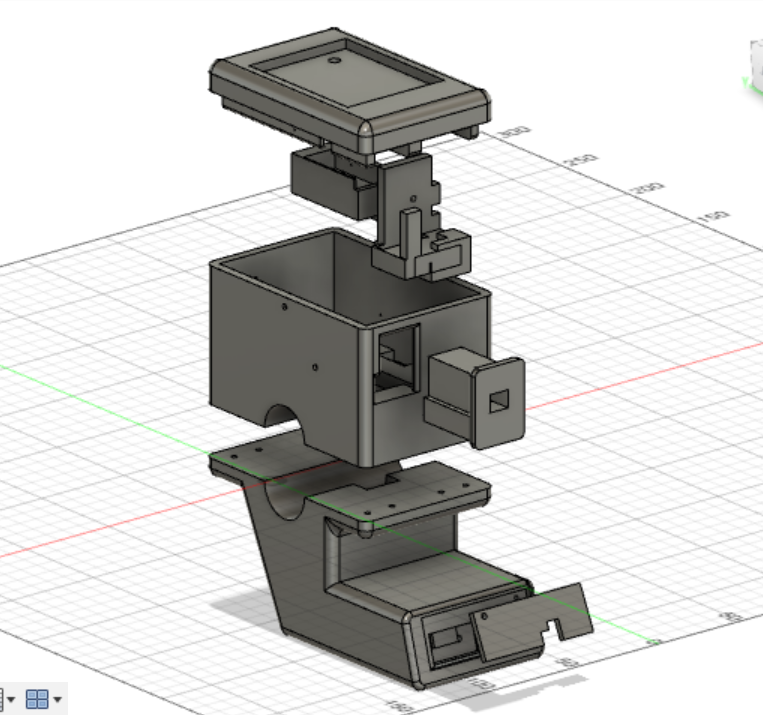
System Architecture & Embedded Electronics Layout
Integrated hardware architecture showing ESP32 control, solenoid actuation, and power management.
Manufacturing & Housing Fabrication Process
3D-printed structural housing designed for mechanical stability, sensor alignment, and secure embedded component integration.
Autonomous Delivery Trailer (Embedded Control System)
Overview
Designed an autonomous delivery trailer integrating mechanical design, embedded sensing, and feedback control to enable stable motion under dynamic and uncertain environmental conditions.
The system models real-time control under external noise and non-stationary conditions.
Core Idea
A mobile control system requiring:
- Continuous stability maintenance
- Adaptive directional response
- Feedback-driven correction under uncertainty
This reflects execution systems under volatility and noisy signals.
System Dynamics
Steering subsystem → directional control
Chassis → structural stability under load
Sensors → environmental feedback loop
Actuation → real-time corrective response
System Insight (Trading Mapping)
System Component Market Interpretation
Steering geometry Directional bias
Sensor feedback Market signals
Load distribution Capital allocation
Chassis stability Risk constraints
Environmental noise Market volatility
Summary
A feedback-controlled mobility system demonstrating stability and adaptability under environmental uncertainty, analogous to execution systems operating under volatile market conditions.
Mobile Control System with Feedback-Based Steering Dynamics
Benchmarks and system outputs demonstrating real-time steering control, sensor-driven feedback loops, and mechanical stability in a mobile embedded delivery system.
Steering Control & Motion Execution System
Ackermann steering demonstrating stable feedback-based directional control.
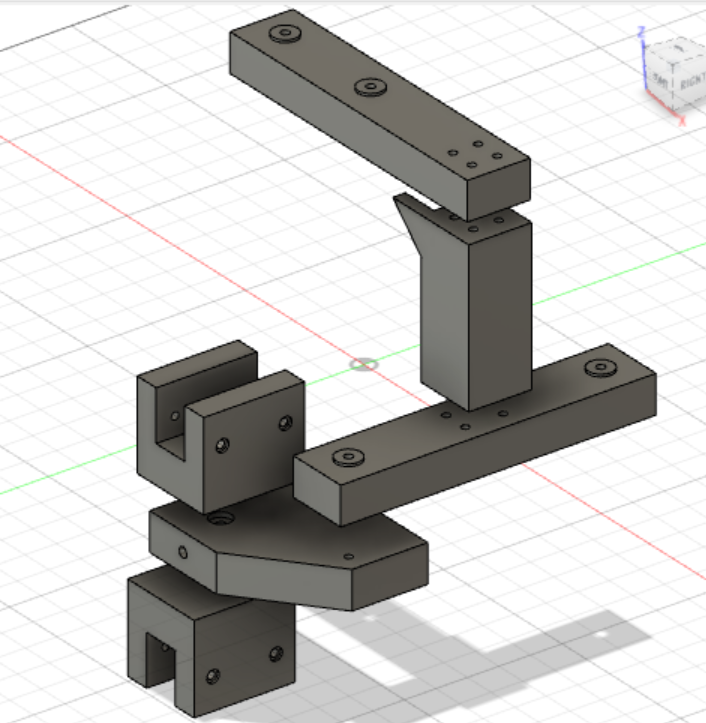
Mechanical System Assembly & CAD Integration
Fusion 360 assembly of Ackermann steering integrated with chassis and control system.
Chassis Construction & Embedded System Integration
Chassis assembly showing structural stability and embedded control integration.
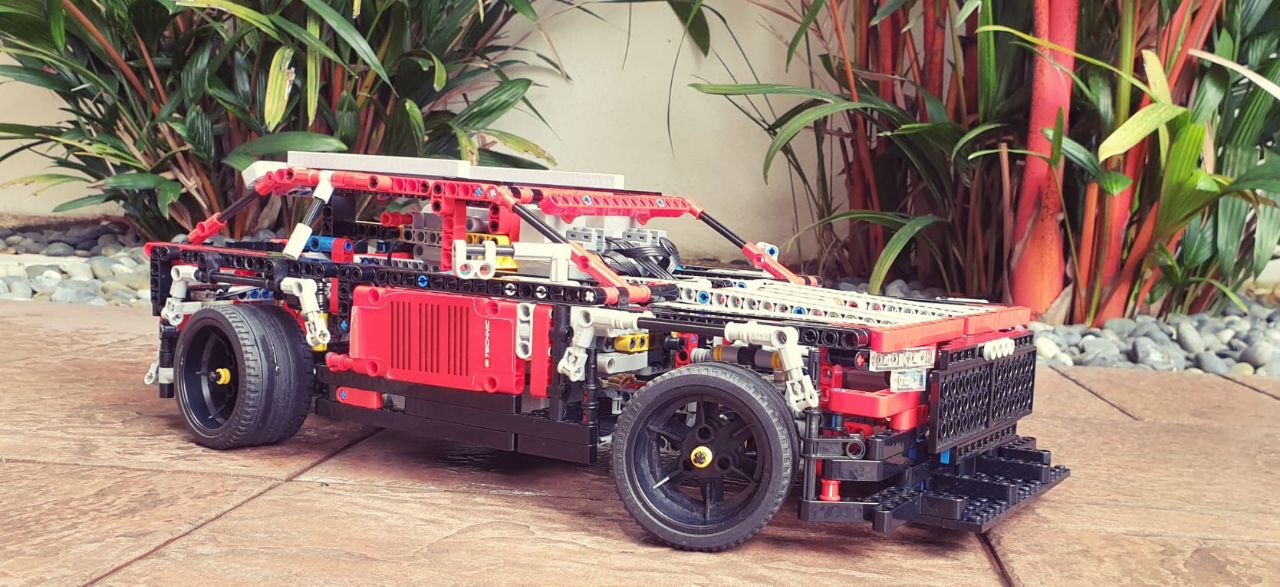
Custom LEGO Technic - Audi RS6
Overview
Designed and built a multi-actuator vehicular control system based on the Audi RS6, featuring distributed motor control, suspension dynamics, and steering coordination to replicate realistic vehicle behavior under constrained actuation.
The system models coordinated multi-agent actuation in a closed mechanical environment.
Core Idea
A simplified model of:
- Distributed actuation systems
- Mechanical coordination across subsystems
- Stability under multi-degree-of-freedom control
This reflects multi-factor allocation and coordination under bounded resources.
System Dynamics
Steering system → directional control layer
Drive motors → execution / propulsion layer
Suspension → shock absorption / volatility buffering
Weight distribution → system equilibrium / balance
System Insight (Trading Mapping)
System Component Market Interpretation
Distributed actuation system Multi-strategy portfolio execution layer
Steering control Signal direction
Suspension Risk buffering
Weight distribution Capital allocation
Stability tuning Portfolio optimization
Summary
A distributed control system demonstrating multi-agent coordination, stability tuning, and constrained resource balancing - analogous to portfolio construction under interacting signals, execution constraints, and risk limits.
Distributed Actuation System under Multi-Constraint Control
Benchmarks and system outputs demonstrating multi-actuator coordination, steering dynamics, and suspension-based stability control in a distributed mechanical system.
Reference Model & Design Blueprint
Reference model defining system constraints and control architecture.
Final Multi-Actuator Vehicle
Multi-actuator vehicular system demonstrating coordinated control under constrained actuation.